CAD Normal Tag flipped after Polyon merge (join) and axis repositioning - how realign?
-
Hi Ferdinand,
sadly i have to resurect this topic hence I still have problem with the normals when the AXIS changes.
I boiled down a script which moves the axis of selected polygon object to the parent (which is a common task in deply nested cad data )
anyway the axis is not a problem but I still have wrong shading because the normals are not transformed corectly ...
I attached a simple exaple file where a nut is orientaded off axis and results in wrong normals when executed the script.
thanks in advance
import c4d, array #from c4d import Vector as V #https://developers.maxon.net/forum/topic/13004/cad-normal-tag-flipped-after-polyon-merge-join-and-axis-repositioning-how-realign/6 #new Task: #Corrects points and normals on a point object after placing the polygon axis to the same as the parent def adjust_point_node(node, transform): """Corrects points and normals on a point object after running the join command in the scenario specific to PC13004. Args: node (c4d.PointObject): The PointObject to transform. transform (c4d.Matrix): The transform to apply. Raises: TypeError: When either `node` or `transform` are not of expected type. """ def read_normal_tag(tag): """`Reads a `c4d.NormalTag` to a list of c4d.Vector. Args: tag (c4d.NormalTag): The tag to read the normals from. Returns: list[c4d.Vector]: The red in normals. There are polygon_count * 4 normals, i.e. each vertex has a normal for each polygon it is attached to. The normals are stored in polygon groups. Raises: RuntimeError: When the memory of the tag cannot be red. TypeError: When `tag` is not a `c4d.NormalTag`. """ if not (isinstance(tag, c4d.BaseTag) and tag.CheckType(c4d.Tnormal)): msg = f"Expected normal tag, received: {tag}." raise TypeError(tag) buffer = tag.GetLowlevelDataAddressR() if buffer is None: msg = "Failed to retrieve memory buffer for VariableTag." raise RuntimeError(msg) data = array.array('h') data.frombytes(buffer) # Convert the int16 representation of the normals to c4d.Vector. return [c4d.Vector(data[i-3] / 32000.0, data[i-2] / 32000.0, data[i-1] / 32000.0) for i in range(3, len(data) + 3, 3)] def write_normal_tag(tag, normals, do_normalize=True): """`Writes a list of c4d.Vector to a `c4d.NormalTag`. Args: tag (c4d.NormalTag): The tag to write the normals to. normals (list[c4d.Vector]): The normals to write. do_normalize (bool, optional): If to normalize the normals. Default to `True`. Note: Does not ensure that `normals` is only composed of c4d.Vector. Raises: IndexError: When `normals` does not match the size of `tag`. RuntimeError: When the memory of the tag cannot be red. TypeError: When `tag` is not a `c4d.NormalTag`. """ if not (isinstance(tag, c4d.BaseTag) and tag.CheckType(c4d.Tnormal)): msg = f"Expected normal tag, received: {tag}." raise TypeError(tag) buffer = tag.GetLowlevelDataAddressW() if buffer is None: msg = "Failed to retrieve memory buffer for VariableTag." raise RuntimeError(msg) if do_normalize: normals = [n.GetNormalized() for n in normals] # Convert c4d.Vector normals to integer representation. raw_normals = [int(component * 32000.0) for n in normals for component in (n.x, n.y, n.z)] # Catch input data of invalid length. count = tag.GetDataCount() if count * 12 != len(raw_normals): msg = (f"Invalid data size. Expected length of {count}. " f"Received: {len(raw_normals)}") raise IndexError(msg) # Write the data back. data = array.array('h') data.fromlist(raw_normals) data = data.tobytes() buffer[:len(data)] = data # --- Start of outer function -------------------------------------------- if (not isinstance(node, c4d.PointObject) or not isinstance(transform, c4d.Matrix)): msg = f"Illegal argument types: {type(node)}{type(transform)}" raise TypeError(msg) # Transform the points of the node. #points = [p * ~transform for p in node.GetAllPoints()] # This works the polygon object stays in place now mat = op.GetMg() points = op.GetAllPoints() for i,p in enumerate(points): points[i] = ~transform * mat * p #Note that the multiplication sequence needs to be read from the right to the left. node.SetAllPoints(points) node.Message(c4d.MSG_UPDATE) # these where my desperate efforts to fix it #------------------------------------------------------------------------ node.SetMg(transform) nodelocalmatrix = node.GetMl() nodematrix = node.GetMg() # Transform its baked normals. tag = node.GetTag(c4d.Tnormal) if isinstance(tag, c4d.NormalTag): # We just have to apply the same transform here (without the # translation). # original Code #normals = [~transform.MulV(n) for n in read_normal_tag(tag)] # my tests normals = [~transform.MulV(n) for n in read_normal_tag(tag)] write_normal_tag(tag, normals) else: msg = f"Could not find normal data to adjust for: {node}." print(f"Warning - {msg}") def main(): c4d.CallCommand(13957) # Konsole löschen if op is None or not op.CheckType(c4d.Opoint): return False doc.StartUndo() doc.AddUndo(c4d.UNDOTYPE_CHANGE, op) targetMat = op.GetUp().GetMg() adjust_point_node(op, targetMat) op.Message(c4d.MSG_UPDATE) c4d.EventAdd() doc.EndUndo() if __name__=='__main__': main() -
Hello @mogh,
thank you for reaching out to us. I think you have your axis inverted. At least that will fix your nut example for me. I frankly would rewrite this from scratch (you can reuse the read and write normal tags functions) when you want to do something differently. I remember I had to jump through some hoops hold up by your outer code, when I wrote
adjust_point_node. But I think it did work then, didn't it?Long story short: removing the inversion works for me, but that whole script is very duct tapey, since it assumes that there will always be a parent and that you only want to tranfer its axis. If you are fine with these restrictions, the script is probably fine.
Cheers,
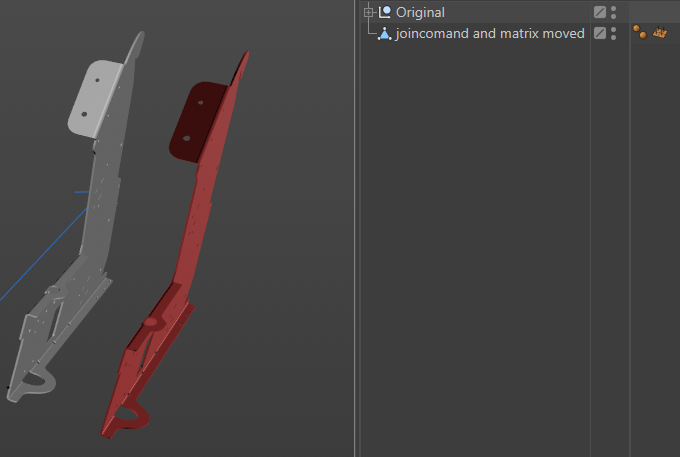
FerdinandThe result:
The code:import c4d, array #from c4d import Vector as V #https://developers.maxon.net/forum/topic/13004/cad-normal-tag-flipped-after-polyon-merge-join-and-axis-repositioning-how-realign/6 #new Task: #Corrects points and normals on a point object after placing the polygon axis to the same as the parent def adjust_point_node(node, transform): """Corrects points and normals on a point object after running the join command in the scenario specific to PC13004. Args: node (c4d.PointObject): The PointObject to transform. transform (c4d.Matrix): The transform to apply. Raises: TypeError: When either `node` or `transform` are not of expected type. """ def read_normal_tag(tag): """`Reads a `c4d.NormalTag` to a list of c4d.Vector. Args: tag (c4d.NormalTag): The tag to read the normals from. Returns: list[c4d.Vector]: The red in normals. There are polygon_count * 4 normals, i.e. each vertex has a normal for each polygon it is attached to. The normals are stored in polygon groups. Raises: RuntimeError: When the memory of the tag cannot be red. TypeError: When `tag` is not a `c4d.NormalTag`. """ if not (isinstance(tag, c4d.BaseTag) and tag.CheckType(c4d.Tnormal)): msg = f"Expected normal tag, received: {tag}." raise TypeError(tag) buffer = tag.GetLowlevelDataAddressR() if buffer is None: msg = "Failed to retrieve memory buffer for VariableTag." raise RuntimeError(msg) data = array.array('h') data.frombytes(buffer) # Convert the int16 representation of the normals to c4d.Vector. return [c4d.Vector(data[i-3] / 32000.0, data[i-2] / 32000.0, data[i-1] / 32000.0) for i in range(3, len(data) + 3, 3)] def write_normal_tag(tag, normals, do_normalize=True): """`Writes a list of c4d.Vector to a `c4d.NormalTag`. Args: tag (c4d.NormalTag): The tag to write the normals to. normals (list[c4d.Vector]): The normals to write. do_normalize (bool, optional): If to normalize the normals. Default to `True`. Note: Does not ensure that `normals` is only composed of c4d.Vector. Raises: IndexError: When `normals` does not match the size of `tag`. RuntimeError: When the memory of the tag cannot be red. TypeError: When `tag` is not a `c4d.NormalTag`. """ if not (isinstance(tag, c4d.BaseTag) and tag.CheckType(c4d.Tnormal)): msg = f"Expected normal tag, received: {tag}." raise TypeError(tag) buffer = tag.GetLowlevelDataAddressW() if buffer is None: msg = "Failed to retrieve memory buffer for VariableTag." raise RuntimeError(msg) if do_normalize: normals = [n.GetNormalized() for n in normals] # Convert c4d.Vector normals to integer representation. raw_normals = [int(component * 32000.0) for n in normals for component in (n.x, n.y, n.z)] # Catch input data of invalid length. count = tag.GetDataCount() if count * 12 != len(raw_normals): msg = (f"Invalid data size. Expected length of {count}. " f"Received: {len(raw_normals)}") raise IndexError(msg) # Write the data back. data = array.array('h') data.fromlist(raw_normals) data = data.tobytes() buffer[:len(data)] = data # --- Start of outer function -------------------------------------------- if (not isinstance(node, c4d.PointObject) or not isinstance(transform, c4d.Matrix)): msg = f"Illegal argument types: {type(node)}{type(transform)}" raise TypeError(msg) # I started cleaning up here a bit by running autopep on the script and # removing some clutter. mat = op.GetMg() points = op.GetAllPoints() for i,p in enumerate(points): points[i] = ~transform * mat * p node.SetAllPoints(points) node.Message(c4d.MSG_UPDATE) node.SetMg(transform) nodelocalmatrix = node.GetMl() nodematrix = node.GetMg() # Transform its baked normals. tag = node.GetTag(c4d.Tnormal) if isinstance(tag, c4d.NormalTag): # The only substantial change I made, I removed the inversion operator. # normals = [~transform.MulV(n) for n in read_normal_tag(tag)] normals = [transform.MulV(n) for n in read_normal_tag(tag)] write_normal_tag(tag, normals) else: msg = f"Could not find normal data to adjust for: {node}." print(f"Warning - {msg}") def main(): c4d.CallCommand(13957) # Konsole löschen if op is None or not op.CheckType(c4d.Opoint): return False doc.StartUndo() doc.AddUndo(c4d.UNDOTYPE_CHANGE, op) targetMat = op.GetUp().GetMg() adjust_point_node(op, targetMat) op.Message(c4d.MSG_UPDATE) c4d.EventAdd() doc.EndUndo() if __name__=='__main__': main() -
Thanks for the quick answer,
@ferdinand said in CAD Normal Tag flipped after Polyon merge (join) and axis repositioning - how realign?:
I think you have your axis inverted.
This was the first fix I tried, it seems to fix the nut, but not all parts, especially when they are tilted on all axis.
I guess I have to find better examples to get to the bottom of this.kind regards
mogh -
That's strange for me inverting the Matrix (using your posted script) does not fix the nut it flips still !
Why do we have different outcomes ? (R23 atm, R25 in the office not tested yet) -
Hi again,
@ferdinand sorry to pester you ....
I recorded my outcome and it seems it does not make a difference if the normals are multiplied by the invers object matrix or the object matrix.
c4d_normal_tag_centeraxis.mp4
The lighting in the video should not change if I center the axis to the parent....
btw if anybody is curious R20 Version needs besides some.stringformat()#data.frombytes(buffer) data.fromstring(buffer) # python 2.7 #data = data.tobytes() data = data.tostring() # python 2.7kind regards
-
Hello @mogh,
precensende
I currently do not have the time to look into this, since you are asking us here effectively to debug your code (which is out of scope of support). The only thing that pops into my head is operator precedence when I look at your video. So, try(~foo).bar()instead of~foo.bar(). I will see if I can take another look at your problem at the end of the week.Cheers,
Ferdinand -
Its getting stranger and I am still unclear whats happening ...
I changed the precedence of thenormals = [ (~transform).MulV(n) for n in read_normal_tag(tag) ]Tested in
R20 - fail -> Normals flip ...
R23 - first test good moving to another parent Null second execution -> Normals flip .. iratic behavior depending on null location ?
R24 - first test good moving to another parent Null second execution ->Normals flip .. iratic behavior depending on null location ?
R25 - first test good moving to another parent Null second execution -> Normals flip .. iratic behavior depending on null location ?kind regards
-
Hello @mogh,
so, I had a look at your problem and this all works very much as expected for me. As stated before, we cannot debug your code for you. You will have to do that yourself. When you can show in a reasonably simple and repeatable example that Cinema 4D does handle vector/linear algebra differently between versions, we will investigate that. Not for R20 though, as this is out of the SDK support cycle. I also seriously doubt that there is a bug in
VectororMatrixof this magnitude in the first place (but I could be wrong).Below you can find my solution for the problem. We cannot debug your code for such math problems for you in the future.
Cheers,
FerdinandThe test file: transferaxis.c4d
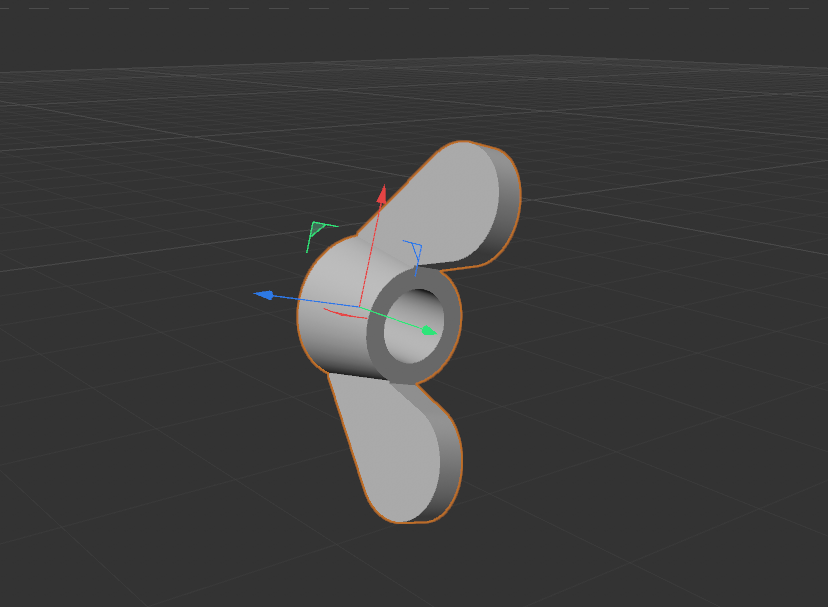
The result:
The code:"""Transfers the axis from one object to another. Also handles vertices and normal tags, and provides a minimal GUI. """ import c4d import array def ReadNormalTag(tag: c4d.NormalTag) -> list[c4d.Vector]: """`Reads a `c4d.NormalTag` to a list of c4d.Vector. Args: tag: The tag to read the normals from. Returns: The red in normals. There are polygon_count * 4 normals, i.e. each vertex has a normal for each polygon it is attached to. The normals are stored in polygon groups. Raises: RuntimeError: When the memory of the tag cannot be red. TypeError: When `tag` is not a `c4d.NormalTag`. """ if not (isinstance(tag, c4d.BaseTag) and tag.CheckType(c4d.Tnormal)): msg = f"Expected normal tag, received: {tag}." raise TypeError(tag) buffer = tag.GetLowlevelDataAddressR() if buffer is None: msg = "Failed to retrieve memory buffer for VariableTag." raise RuntimeError(msg) data = array.array('h') data.frombytes(buffer) # Convert the int16 representation of the normals to c4d.Vector. return [c4d.Vector(data[i-3] / 32000.0, data[i-2] / 32000.0, data[i-1] / 32000.0) for i in range(3, len(data) + 3, 3)] def WriteNormalTag(tag: c4d.NormalTag, normals: list[c4d.Vector], normalize: bool = True) -> None: """`Writes a list of c4d.Vector to a `c4d.NormalTag`. Args: tag: The tag to write the normals to. normals: The normals to write. normalize: If to normalize the normals. Defaults to `True`. Note: Does not ensure that `normals` is only composed of c4d.Vector. Raises: IndexError: When `normals` does not match the size of `tag`. RuntimeError: When the memory of the tag cannot be red. TypeError: When `tag` is not a `c4d.NormalTag`. """ if not (isinstance(tag, c4d.BaseTag) and tag.CheckType(c4d.Tnormal)): msg = f"Expected normal tag, received: {tag}." raise TypeError(tag) buffer = tag.GetLowlevelDataAddressW() if buffer is None: msg = "Failed to retrieve memory buffer for VariableTag." raise RuntimeError(msg) if normalize: normals = [n.GetNormalized() for n in normals] # Convert c4d.Vector normals to integer representation. raw_normals = [int(component * 32000.0) for n in normals for component in (n.x, n.y, n.z)] # Catch input data of invalid length. count = tag.GetDataCount() if count * 12 != len(raw_normals): msg = (f"Invalid data size. Expected length of {count}. " f"Received: {len(raw_normals)}") raise IndexError(msg) # Write the data back. data = array.array('h') data.fromlist(raw_normals) data = data.tobytes() buffer[:len(data)] = data def TransferAxisTo(node: c4d.BaseObject, target: c4d.BaseObject) -> None: """Moves the axis of node to target. """ mgNode = node.GetMg() mgTarget = target.GetMg() # Set the transform of the node to the target transform. doc.StartUndo() doc.AddUndo(c4d.UNDOTYPE_CHANGE, node) node.SetMg(mgTarget) # Exit when node is not a point object. if not isinstance(node, c4d.PointObject): doc.EndUndo() return None # Compute the transform delta between both objects with and without # translations and transform all vertices. mgDelta = ~mgTarget * mgNode mgOrientationDelta = c4d.Matrix( v1=mgDelta.v1, v2=mgDelta.v2, v3=mgDelta.v3) node.SetAllPoints([p * mgDelta for p in op.GetAllPoints()]) node.Message(c4d.MSG_UPDATE) # Exit when node has no normal tag. normalTag = node.GetTag(c4d.Tnormal) if not isinstance(normalTag, c4d.NormalTag): doc.EndUndo() return None # Transform the normals in the normal tag. newNormals = [n * mgOrientationDelta for n in ReadNormalTag(normalTag)] doc.AddUndo(c4d.UNDOTYPE_CHANGE, normalTag) WriteNormalTag(normalTag, newNormals, normalize=True) doc.EndUndo() def main() -> None: """Entry point that runs the code when there is an active object. """ if not isinstance(op, c4d.BaseObject): c4d.gui.MessageDialog("Please select an object.") return None # Get all the ancestor nodes of the selected node. ancestors, parent = [], op.GetUp() while parent: ancestors.insert(0, parent) parent = parent.GetUp() # Build and show a popup menu for all ancestors with their name and icon. bc, idBase = c4d.BaseContainer(), 1000 for i, node in enumerate(ancestors): bc.InsData(idBase + i, f"{node.GetName()}&i{node.GetType()}&") res = c4d.gui.ShowPopupDialog(None, bc, c4d.MOUSEPOS, c4d.MOUSEPOS) # The user did abort the popup. if res == 0: return # Carry out the modification of the axis of op to target. target = ancestors[res - idBase] TransferAxisTo(op, target) c4d.EventAdd() if __name__ == '__main__': main() -
Thank you ferdinand for your personal time ...
will check the Code in the office tomorrow ...kind regards
mogh -
Seems to work ... fingers crossed...
you managed to implement the normal tag handling faster ! my script that cleans up CAD data went down from 60 seconds to 25 seconds !!!!
11153152 function calls in 25.692 seconds Ordered by: cumulative time ncalls tottime percall cumtime percall filename:lineno(function) 1 0.547 0.547 25.692 25.692 03 optimize Objects.py:354(main) 889 1.696 0.002 21.027 0.024 03 optimize Objects.py:205(TransferAxisTo) 889 0.016 0.000 10.535 0.012 03 optimize Objects.py:159(WriteNormalTag) 889 0.005 0.000 6.767 0.008 03 optimize Objects.py:127(ReadNormalTag) 889 6.750 0.008 6.750 0.008 03 optimize Objects.py:154(<listcomp>) 889 6.137 0.007 6.137 0.007 03 optimize Objects.py:189(<listcomp>) 1 0.000 0.000 3.051 3.051 03 optimize Objects.py:290(optimizepolyobject) 1 3.051 3.051 3.051 3.051 {built-in method c4d.utils.SendModelingCommand} 889 1.763 0.002 2.956 0.003 03 optimize Objects.py:186(<listcomp>) 889 1.679 0.002 1.679 0.002 03 optimize Objects.py:237(<listcomp>) 889 1.413 0.002 1.413 0.002 {method 'fromlist' of 'array.array' objects} 11038804 1.193 0.000 1.193 0.000 {method 'GetNormalized' of 'c4d.Vector' objects} 889 0.004 0.000 0.813 0.001 03 optimize Objects.py:245(removesinglenull) 890 0.808 0.001 0.808 0.001 {built-in method c4d.CallCommand} 1876 0.237 0.000 0.237 0.000 {method 'GetAllPoints' of 'c4d.PointObject' objects} 889 0.157 0.000 0.157 0.000 03 optimize Objects.py:227(<listcomp>) 1778 0.082 0.000 0.082 0.000 {method 'AddUndo' of 'c4d.documents.BaseDocument' objects} 3763 0.006 0.000 0.047 0.000 03 optimize Objects.py:81(statusbar) 3763 0.028 0.000 0.028 0.000 {built-in method c4d.StatusSetBar} 8045 0.007 0.000 0.026 0.000 03 optimize Objects.py:38(GetNextObject) 889 0.017 0.000 0.017 0.000 {method 'SetAllPoints' of 'c4d.PointObject' objects} 21 0.017 0.001 0.017 0.001 {built-in method c4d.StatusSetText} 2 0.002 0.001 0.016 0.008 03 optimize Objects.py:61(get_all_poly_objects) 2 0.001 0.000 0.011 0.005 03 optimize Objects.py:52(get_all_objects) 13109 0.011 0.000 0.011 0.000 {method 'GetUp' of 'c4d.GeListNode' objects} 889 0.011 0.000 0.011 0.000 {method 'tobytes' of 'array.array' objects} 889 0.010 0.000 0.010 0.000 {method 'frombytes' of 'array.array' objects} 13696 0.008 0.000 0.008 0.000 {method 'GetNext' of 'c4d.GeListNode' objects} 11327 0.005 0.000 0.005 0.000 {method 'GetDown' of 'c4d.GeListNode' objects} 994 0.002 0.000 0.004 0.000 03 optimize Objects.py:90(rename) 1938 0.004 0.000 0.004 0.000 {method 'GetChildren' of 'c4d.GeListNode' objects} 889 0.004 0.000 0.004 0.000 {method 'Message' of 'c4d.C4DAtom' objects} 1 0.000 0.000 0.004 0.004 03 optimize Objects.py:71(get_all_null_objects) 2 0.003 0.002 0.003 0.002 {built-in method c4d.StatusSetSpin} 889 0.002 0.000 0.002 0.000 {method 'SetMg' of 'c4d.BaseObject' objects} 8575 0.002 0.000 0.002 0.000 {method 'CheckType' of 'c4d.C4DAtom' objects} 1778 0.002 0.000 0.002 0.000 {method 'GetMg' of 'c4d.BaseObject' objects} 889 0.001 0.000 0.001 0.000 {method 'GetTag' of 'c4d.BaseObject' objects} 889 0.001 0.000 0.001 0.000 {method 'DelBit' of 'c4d.BaseList2D' objects} 1038 0.001 0.000 0.001 0.000 {method 'Remove' of 'c4d.GeListNode' objects} 4611 0.001 0.000 0.001 0.000 {built-in method builtins.len} 3976 0.001 0.000 0.001 0.000 {method 'split' of 'str' objects} 994 0.001 0.000 0.001 0.000 {method 'SetName' of 'c4d.BaseList2D' objects} 4550 0.001 0.000 0.001 0.000 {built-in method builtins.isinstance} 889 0.001 0.000 0.001 0.000 {method 'GetLowlevelDataAddressR' of 'c4d.VariableTag' objects} 994 0.001 0.000 0.001 0.000 {method 'GetName' of 'c4d.BaseList2D' objects} 889 0.001 0.000 0.001 0.000 {method 'GetLowlevelDataAddressW' of 'c4d.VariableTag' objects} 889 0.001 0.000 0.001 0.000 {method 'GetDataCount' of 'c4d.VariableTag' objects} 6844 0.001 0.000 0.001 0.000 {method 'append' of 'list' objects} 889 0.000 0.000 0.000 0.000 {method 'SetBit' of 'c4d.BaseList2D' objects} 8 0.000 0.000 0.000 0.000 {built-in method builtins.print} 24 0.000 0.000 0.000 0.000 __init__.py:65(write) 1 0.000 0.000 0.000 0.000 {built-in method c4d.StatusClear} 24 0.000 0.000 0.000 0.000 __init__.py:46(MAXON_SOURCE_LOCATION) 24 0.000 0.000 0.000 0.000 {built-in method _maxon_core.GetCurrentTraceback} 994 0.000 0.000 0.000 0.000 {method 'replace' of 'str' objects} 24 0.000 0.000 0.000 0.000 {built-in method _maxon_output.stdout_write} 1 0.000 0.000 0.000 0.000 03 optimize Objects.py:261(savetorun) 1 0.000 0.000 0.000 0.000 03 optimize Objects.py:31(gime_time) 1 0.000 0.000 0.000 0.000 {method 'GetFirstObject' of 'c4d.documents.BaseDocument' objects} 1 0.000 0.000 0.000 0.000 {built-in method c4d.EventAdd} 1 0.000 0.000 0.000 0.000 {built-in method c4d.documents.GetActiveDocument} 2 0.000 0.000 0.000 0.000 {built-in method c4d.GeGetTimer} 2 0.000 0.000 0.000 0.000 {built-in method builtins.divmod} 1 0.000 0.000 0.000 0.000 {method 'disable' of '_lsprof.Profiler' objects}as I understand my problem in my thinking was not rotating the orentation seperatly ....
mgOrientationDelta = c4d.Matrix(v1=mgDelta.v1, v2=mgDelta.v2, v3=mgDelta.v3)Should I / we mark your last code as solution as its working better and is easier to understand ?!?
anyway thank you again and I am sorry to have caused any trouble ...
kind regards .... -
Hey,
good to hear that it does work for you (for now)
") I do not think that the definition of
I do not think that the definition of mgOrientationDeltais the culprit. It is just another way of doing what was done before with.MulV, i.e., it is just a transform without the offset component. As I indicated in my last posting, I did not spend much time with debugging your code, I just copied over the tag stuff and wrote the rest from scratch.I do not think that we do have to change anything here in the topic structure. But if you personally feel it would be better so, you can of course do it. At least I think you can, you have to open the topic tools button:

and there you should then have this button:
If you do not, well then only mods can do that

Cheers,
Ferdinand -
 F ferdinand referenced this topic on
F ferdinand referenced this topic on