c4d.utils.Neighbor¶
-
class
c4d.utils.Neighbor¶ Class to get neighbouring polygons from edges and points.
To get point->poly connections use
Neighbor.GetPointPolys().To get edge->poly connections use
Neighbor.GetEdgePolys().To get poly->edge connections use
Neighbor.GetPolyInfo(), which additionally allows you to retrieve neighbor polygons directly.
Note
This class assumes that the geometry is clean such that an edge is only shared by two polygons.If this is not the case then the information may not be correct.Warning
The object passed toNeighbor.Init()must not be modified during the use of this class.For example, if you resize a polygon object or modify the polygons this class may crash if you then try and use the classes functions.
Methods Signatures
|
Initialise the internal polygon information. |
|
Flushes the neighbor information. |
|
|
|
|
|
|
|
Get the total number of edges found. |
|
Get a dict that contains neighbor information about the given polygon. One can use this to browse through all available edges using the following code |
|
Gets the points that are attached through one edge to the given point. |
Methods Documentation
-
Neighbor.__init__(self)¶ - Return type
- Returns
The new neighbor object.
-
Neighbor.Init(self, op, bs=None)¶ Initialise the internal polygon information.
Note
This function must be called before the class can be used to get the neighbouring polygons.
- Parameters
op (c4d.PolygonObject) – The class object.
bs (c4d.BaseSelect) – The polygon selection that will be used to build the neighbor information. By default None to use all polygons.
-
Neighbor.Flush(self)¶ Flushes the neighbor information.
-
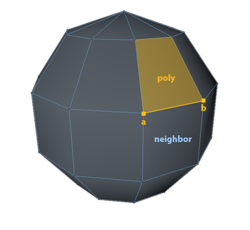
Neighbor.GetNeighbor(self, a, b, poly)¶ -
Gets the polygon opposite to poly with respect to the edge from point a to b.
- Parameters
a (int) – The point index that defines the first edge point.
b (int) – The point index that defines the second edge point.
poly (int) – The index of the polygon to get the polygon opposite to.
poly – The index of the polygon to get the polygon opposite to.
- Raises
IndexError – If a, b or poly is out of range.
- Returns
The opposite polygon index, or NOTOK if none exists or if poly is not one of the edge polygons.
-
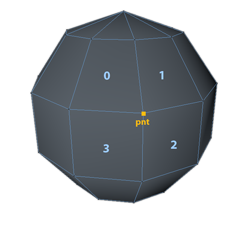
Neighbor.GetPointPolys(self, pnt)¶ -
Get the polygons that are attached to the given point index.
For example:
import c4d nb = c4d.utils.Neighbor() polys = nb.GetPointPolys(137) for poly in polys: # do something with poly pass
- Parameters
pnt (int) – The point index to use to find the associated polygons.
- Raises
IndexError – If pnt is out of range.
- Return type
list
- Returns
A list of returned polygons.
-
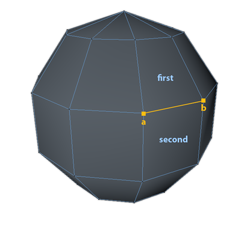
Neighbor.GetEdgePolys(self, a, b)¶ -
Get the polygons that neighbor the given edge:
# This example retrieve the polygons around the point ID 137 import c4d nb = c4d.utils.Neighbor() first, second = nb.GetEdgePolys(1, 2) # do something with Polygon A and B print first, second
- Parameters
a (int) – The point index that defines the first edge point.
b (int) – The point index that defines the second edge point.
- Raises
IndexError – If a or b is out of range.
- Return type
tuple(int, int)
- Returns
The first and second polygon associated with the edge.
-
Neighbor.GetEdgeCount(self)¶ Get the total number of edges found.
- Return type
int
- Returns
The number of edges.
-
Neighbor.GetPolyInfo(self, poly)¶ Get a dict that contains neighbor information about the given polygon. One can use this to browse through all available edges using the following code
import c4d nbr = c4d.utils.Neighbor() nbr.Init(op) vadr = op.GetAllPolygons() for i in xrange(op.GetPolygonCount()): pli = nbr.GetPolyInfo(i) # Test all 4 sides of a polygon for side in xrange(4): # Only proceed if edge has not already been processed # and edge really exists (for triangles side 2 from c..d does not exist as c==d) if pli["mark"][side] or (side == 2 and vadr[i].c == vadr[i].d): continue # One can also skip the side == 2 && vadr[i].c==vadr[i].d test as pli["mark"][2] is always True for triangles if side == 0: a = vadr[i].a; b = vadr[i].b elif side == 1: a = vadr[i].b; b = vadr[i].c elif side == 2: a = vadr[i].c; b = vadr[i].d elif side == 3: a = vadr[i].d; b = vadr[i].a # Do something with the edge a..b
0-1-2-3 are the indices for a-b/b-c/c-d/d-a.For triangles the face/edge index 2 is set to NOTOK (as c == d). e.g. a value of 5-8-2-1 for face means: a-b neighbor face is 5, b-c neighbor face is 8 etc.- Parameters
poly (int) – The polygon index to get the neighbor information for.
- Return type
dict{mark: bool*4, face: int*4, edge: int*4}
- Returns
The neighbor information about the given polygon.
- Key mark
False if that polygon “generated” an edge, for example think of two polygons that share an edge, one has set mark = False for this edge because it was the first and “built” this edge and the other(s) will set mark = True as no new edge had to be generated.
- Key face
The neighbouring polygons. Note: If a value is NOTOK this means there is no neighbor.
- Key edge
The edges of the polygon.
-
Neighbor.GetPointOneRingPoints(self, pnt)¶ Gets the points that are attached through one edge to the given point.
New in version R19.
- Parameters
pnt (int) – The point index to use to find the associated one ring points.
- Return type
List[int]
- Returns
A list of points indices.