c4d.utils.GeRayCollider¶
-
class
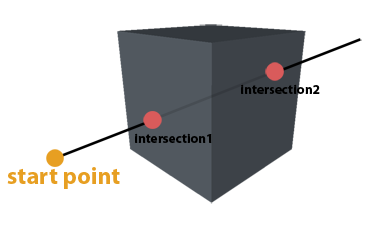
c4d.utils.GeRayCollider¶ Evaluates intersections between a ray and a polygon object. The ray is defined by a point, a ray and length.
In the following example a ray intersects a cube:
Methods Signatures
Initializes the ray collider with the object specified by goal. |
|
Checks if the line segment specified by ray_p to ray_p + ray_dir*ray_length intersects the object. |
|
Returns the number of intersections found by |
|
Retrieves the intersection information, found by |
|
Retrieves the intersection, found by |
Methods Documentation
-
GeRayCollider.__init__(self)¶
-
GeRayCollider.Init(self, goal, force=False)¶ Initializes the ray collider with the object specified by goal.
- Parameters
goal (c4d.PolygonObject) – The object to check for intersections. The object is copied.
force (bool) –
If False then Cinema checks if the passed object’sC4DAtom.GetDirty(c4d.DIRTYFLAGS_DATA)is unchanged. If yes, it does nothing and returns True.If True it always rebuilds the cache.
- Return type
bool
- Returns
True if successful, otherwise False.
-
GeRayCollider.Intersect(self, ray_p, ray_dir, length, only_test=False)¶ Checks if the line segment specified by ray_p to ray_p + ray_dir*ray_length intersects the object.
- Parameters
ray_p (c4d.Vector) – Start point of the ray in object coordinates
ray_dir (c4d.Vector) – Ray direction in object coordinates.
ray_length (number) – Ray length.
only_test (bool) – If this is True no information about the intersections are stored, so only the return value can be used to tell if there were intersections or not.
- Return type
bool
- Returns
True if there was in intersection, otherwise False
-
GeRayCollider.GetIntersectionCount(self)¶ Returns the number of intersections found by
Intersect().- Return type
int
- Returns
Number of intersections.
-
GeRayCollider.GetIntersection(self, number)¶ Retrieves the intersection information, found by
GeRayCollider.Intersect(), by index:import c4d rc = c4d.utils.GeRayCollider() intersection = rc.GetIntersection(id) intersection["face_id"] # The polygon index, int intersection["tri_face_id"] # If first half of quad or triangle face_id + 1, else -(face_id + 1), int intersection["hitpos"] # Position of the intersection, c4d.Vector intersection["distance"] # Distance to the intersection, float intersection["s_normal"] # Same as f_normal (reserved for phong normal at the intersection (Not normalized)), c4d.Vector intersection["f_normal"] # Face normal (Not normalized), c4d.Vector intersection["barrycoords"] # Barycentric coordinates of the intersection (x = u, y = v, z = d), c4d.Vector intersection["backface"] # True if the intersected face's normal points away from the camera, otherwise False, bool
- Parameters
number (int) – Intersection index.
- Raises
IndexError – If intersection index is out of range : 0<=number<
GetIntersectionCount().- Return type
dict
- Returns
The intersection information.
-
GeRayCollider.GetNearestIntersection(self)¶ Retrieves the intersection, found by
Intersect(), closest to the start of the ray.- Return type
Optional[Dict[int, int, c4d.Vector, float, c4d.Vector, c4d.Vector, c4d.Vector, bool]]
- Returns
The nearest intersection or None if there was no intersection.